STMicroelectronics VL53L5CX Senzor de măsurare a timpului de zbor multizonă

Introducere
Scopul acestui manual de utilizare este de a explica modul de manipulare a senzorului VL53L5CX Time-of-Flight (ToF), folosind API-ul ultra lite driver (ULD). Descrie principalele funcții de programare a dispozitivului, calibrări și rezultate.
VL53L5CX este un senzor de ultimă oră, ToF, multizonă, care îmbunătățește familia de produse STMicroelectronics Flight Sense. Găzduit într-un pachet reflowabil în miniatură, acesta integrează o matrice SPAD, filtre fizice în infraroșu și elemente optice difractive (DOE) pentru a obține cea mai bună performanță în diferite condiții de iluminare ambientală, cu o gamă largă de materiale de acoperire.
Măsurătorile distanțelor multizone sunt posibile până la 8×8 zone cu un câmp diagonal larg de 63° view (FoV) care poate fi
redus de software. Fiecare zonă a VL53L5CX măsoară distanța țintei până la 4 metri, la o frecvență maximă de 60 Hz.
Datorită algoritmilor de histogramă patentați de STMicroelectronics, VL53L5CX este capabil să detecteze diferite obiecte în FoV.
Histograma oferă, de asemenea, imunitate la diafonia din sticlă dincolo de 60 cm.

Referințe
Foaie de date VL53L5CX (DS13754).
Acronime si abrevieri
| Acronim/abreviere | Definiţie |
| CĂPRIOARĂ | element optic difractiv |
| FoV | domeniul de view |
| I²C | circuit inter-integrat (bus serial) |
| Kcps/SPAD | Număr de kilograme pe secundă per spad (unitate utilizată pentru a cuantifica numărul de fotoni din matricea SPAD) |
| RAM | memorie cu acces aleatoriu |
| SCL | linie de ceas serial |
| SDA | date seriale |
| SPAD | diodă de avalanșă cu un singur foton |
| ToF | Ora zborului |
| ULD | driver ultra lite |
| VCSEL | diodă emițătoare de suprafață cu cavitate verticală |
| VHV | volum foarte maretage |
| Xtalk | diafonie |
Descrierea funcțională
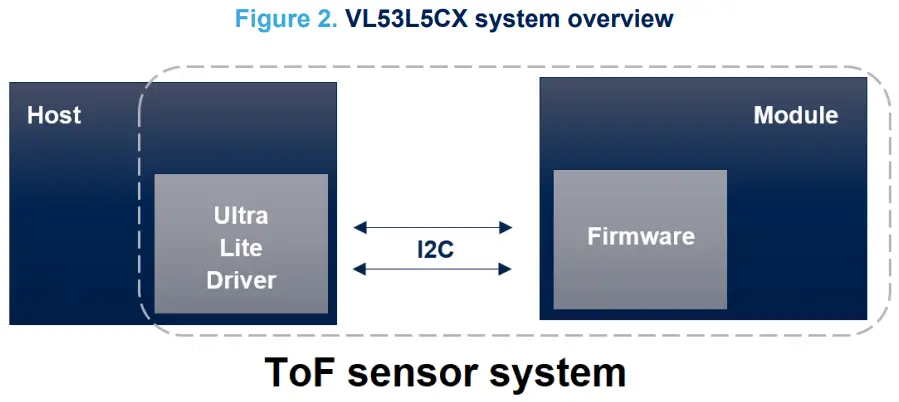
Sistem terminatview
Sistemul VL53L5CX este compus dintr-un modul hardware și software-ul driver ultra lite (VL53L5CX ULD) care rulează pe o gazdă (vezi figura de mai jos). Modulul hardware conține senzorul ToF. STMicroelectronics furnizează driverul software, care este denumit în acest document „driverul”. Acest document descrie funcțiile driverului, care sunt accesibile gazdei. Aceste funcții controlează senzorul și obțin date de distanță.
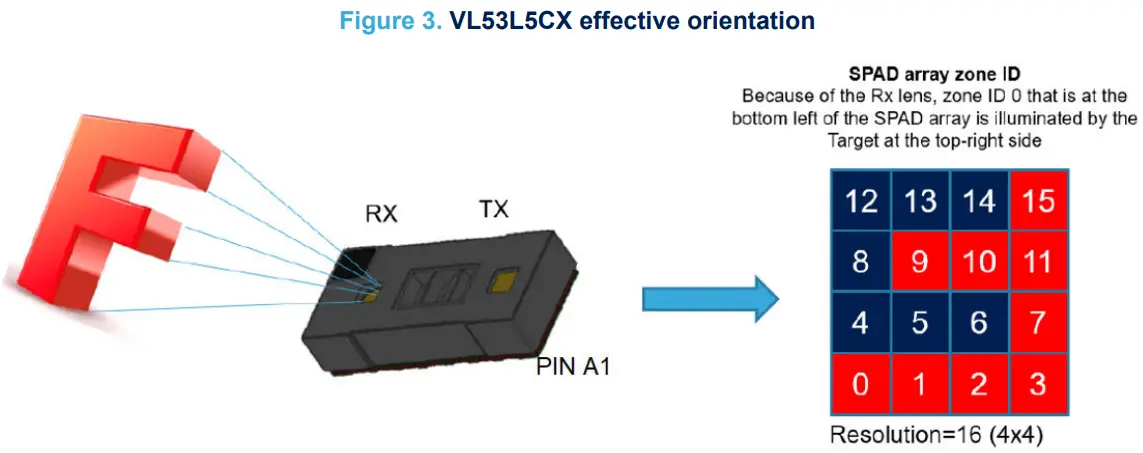
Orientare eficientă
Modulul include o lentilă peste diafragma Rx, care răstoarnă (orizontal și vertical) imaginea capturată a țintei. În consecință, zona identificată ca zona 0, în partea stângă jos a matricei SPAD, este iluminată de o țintă situată în partea dreaptă sus a scenei.
Scheme și configurație I²C
Comunicația dintre driver și firmware este gestionată de I²C, cu capacitatea de a funcționa până la 1 MHz. Implementarea necesită pull-up-uri pe liniile SCL și SDA. Consultați fișa de date VL53L5CX pentru mai multe informații.
Dispozitivul VL53L5CX are o adresă I²C implicită de 0x52. Cu toate acestea, este posibil să schimbați adresa implicită pentru a evita conflictele cu alte dispozitive sau pentru a facilita adăugarea mai multor module VL53L5CX la sistem pentru un FoV de sistem mai mare. Adresa I²C poate fi schimbată folosind funcția vl53l5cx_set_i2c_address().
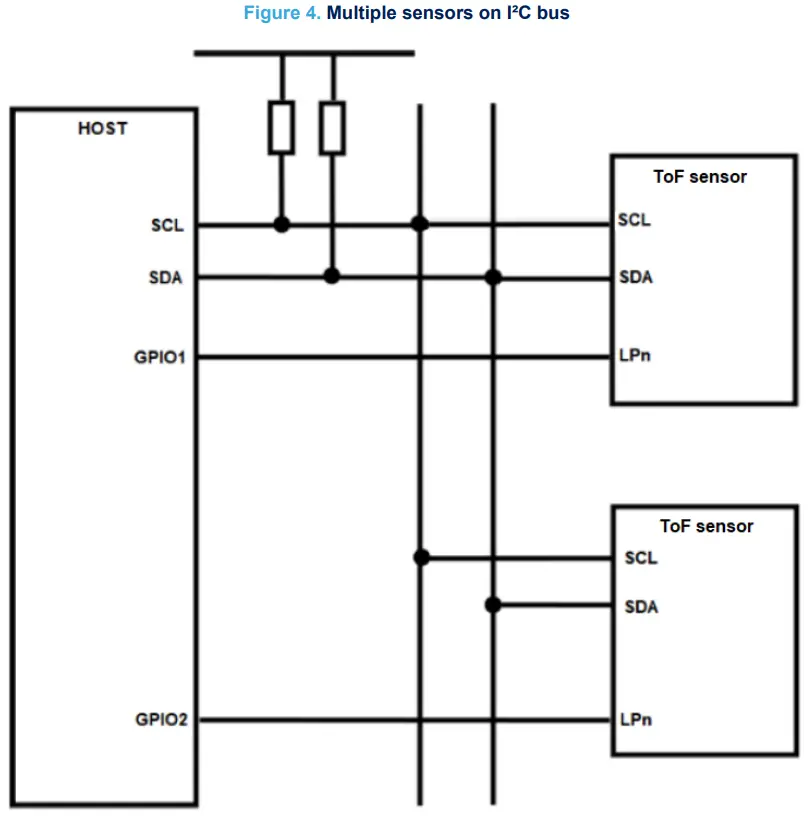
Pentru a permite unui dispozitiv să aibă adresa I²C schimbată fără a afecta pe alții de pe magistrala I²C, este important să dezactivați comunicația I²C a dispozitivelor care nu sunt modificate. Procedura este următoarea:
- Porniți sistemul ca de obicei.
- Trageți în jos pinul LPn al dispozitivului căruia nu i se va schimba adresa.
- Trageți în sus pinul LPn al dispozitivului care are adresa I²C schimbată.
- Programați adresa I²C pe dispozitiv utilizând funcția set_i2c_address().
- Trageți în sus pinul LPn al dispozitivului care nu este reprogramat.
Toate dispozitivele ar trebui să fie acum disponibile pe magistrala I²C. Repetați pașii de mai sus pentru toate dispozitivele VL53L5CX din sistem care necesită o nouă adresă I²C.
Conținutul pachetului și fluxul de date
Arhitectura și conținutul driverului
Pachetul VL53L5CX ULD este compus din patru foldere. Driverul se află în folderul / VL53L5CX_ULD_API.
Soferul este compus din obligatorii si optionali files. Opțional files sunt plugins folosit pentru a extinde caracteristicile ULD.
Fiecare plugin începe cu cuvântul „vl53l5cx_plugin” (de exemplu, vl53l5cx_plugin_xtalk.h). Dacă utilizatorul nu dorește propunerea plugins, pot fi eliminate fără a afecta celelalte caracteristici ale driverului. Următoarea figură reprezintă cea obligatorie files și opționalul plugins.
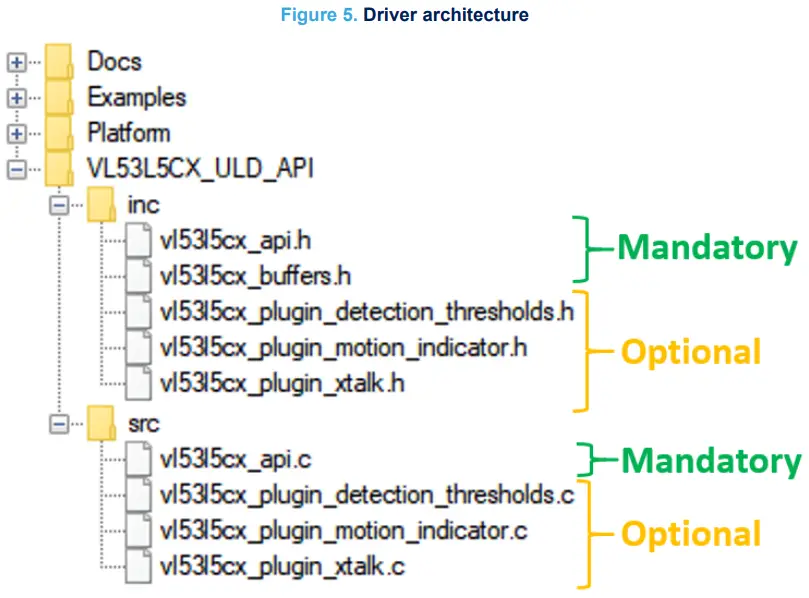
De asemenea, utilizatorul trebuie să implementeze două filese află în folderul /Platform. Platforma propusă este o carcasă goală și trebuie să fie umplută cu funcții dedicate.
Nota: Platformă.h file conține macrocomenzi obligatorii pentru a utiliza ULD. Toate file conținutul este obligatoriu pentru a utiliza corect ULD.
Fluxul de calibrare
Crosstalk (Xtalk) este definită ca cantitatea de semnal primită pe matricea SPAD, care se datorează reflectării luminii VCSEL în interiorul ferestrei de protecție (sticlă de acoperire) adăugată deasupra modulului. Modulul VL53L5CX este autocalibrat și poate fi utilizat fără nicio calibrare suplimentară.
Calibrarea diafoniei poate fi necesară dacă modulul este protejat de o sticlă de acoperire. VL53L5CX este imun la diafonie peste 60 cm datorită unui algoritm de histogramă. Cu toate acestea, la distanțe scurte sub 60 cm, Xtalk poate fi mai mare decât semnalul returnat real. Acest lucru dă o citire falsă a țintei sau face ca țintele să pară mai aproape decât sunt în realitate. Toate funcțiile de calibrare a diafoniei sunt incluse într-un plugin Xtalk (opțional). Utilizatorul trebuie să folosească file „vl53l5cx_plugin_xtalk”.
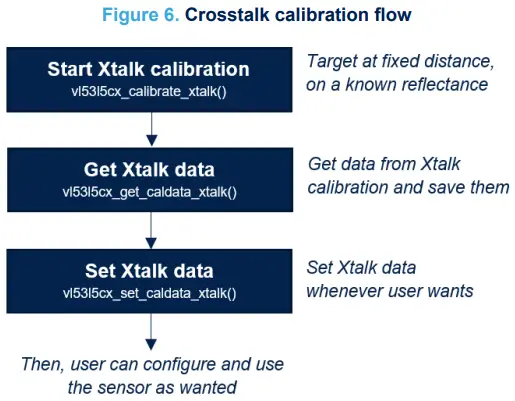
Diafonia poate fi calibrată o dată, iar datele pot fi salvate pentru a putea fi reutilizate ulterior. Este necesară o țintă la o distanță fixă, cu o reflectanță cunoscută. Distanța minimă necesară este de 600 mm, iar ținta trebuie să acopere întregul FoV. În funcție de configurație, utilizatorul poate modifica setările pentru a adapta calibrarea diafoniei, așa cum este propus în tabelul următor.
Masă 1. Setări disponibile pentru calibrare
| Setare | Min | Propus de STMicroelectronics | Max |
| Distanța [mm] | 600 | 600 | 3000 |
| Numărul de samples | 1 | 4 | 16 |
| Reflectanta [%] | 1 | 3 | 99 |
Nota: Creșterea numărului de samples crește acuratețea, dar crește și timpul de calibrare. Timpul relativ la numărul de samples este liniar, iar valorile urmează timeout-ul aproximativ:
- 1 sample ≈ 1 secundă
- 4 samp≈ 2.5 secunde
- 16 samp≈ 8.5 secunde
Calibrarea se realizează folosind funcția vl53l5cx_calibrate_xtalk(). Această funcție poate fi utilizată în orice moment. Cu toate acestea, senzorul trebuie inițializat mai întâi. Următoarea figură reprezintă fluxul de calibrare a diafoniei.
Debitul variabil
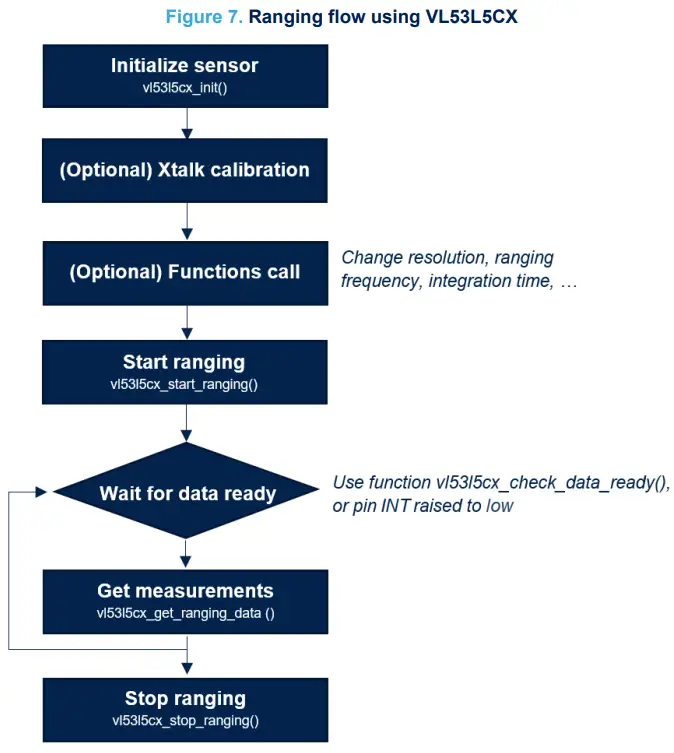
Următoarea figură reprezintă debitul de măsurare utilizat pentru a obține măsurători. Calibrarea Xtalk și apelurile de funcții opționale trebuie utilizate înainte de a începe sesiunea de rang. Funcțiile de obținere/setare nu pot fi utilizate în timpul unei sesiuni de distanță, iar programarea „din zbor” nu este acceptată.
Caracteristici disponibile
API-ul VL53L5CX ULD include mai multe funcții, care permit utilizatorului să regleze senzorul, în funcție de cazul de utilizare. Toate funcțiile disponibile pentru șofer sunt descrise în următoarele secțiuni.
Inițializare
Inițializarea trebuie făcută înainte de a utiliza senzorul VL53L5CX. Această operațiune necesită utilizatorului:
- Porniți senzorul (pinii VDDIO, AVDD, LPn setat la Înalt și pinul I2C_RST setat la 0)
- Apelați funcția vl53l5cx_init(). Funcția copiază firmware-ul (~84 Kbytes) în modul. Acest lucru se face prin încărcarea codului prin interfața I²C și efectuând o rutină de pornire pentru a finaliza inițializarea.
Gestionarea resetarii senzorului
Pentru a reseta dispozitivul, trebuie să comutați următorii pini:
- Setați pinii VDDIO, AVDD și LPn la nivel scăzut.
- Așteptați 10 ms.
- Setați pinii VDDIO, AVDD și LPn la mare.
Nota: Comutarea numai a pinului I2C_RST resetează comunicarea I²C.
Rezoluţie
Rezoluția corespunde numărului de zone disponibile. Senzorul VL53L5CX are două rezoluții posibile: 4×4 (16 zone) și 8×8 (64 de zone). Implicit senzorul este programat în 4×4.
Funcția vl53l5cx_set_resolution() permite utilizatorului să modifice rezoluția. Deoarece frecvența de măsurare depinde de rezoluție, această funcție trebuie utilizată înainte de a actualiza frecvența de măsurare. Mai mult, modificarea rezoluției crește și dimensiunea traficului pe magistrala I²C atunci când sunt citite rezultatele.
Frecvență de variație
Frecvența de măsurare poate fi utilizată pentru a modifica frecvența de măsurare. Deoarece frecvența maximă este diferită între rezoluțiile 4×4 și 8×8, această funcție trebuie utilizată după alegerea unei rezoluții. Valorile minime și maxime permise sunt enumerate în tabelul următor.
Masă 2. Frecvențe minime și maxime
| Rezoluţie | Frecvență minimă [Hz] | Frecvența maximă [Hz] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
Frecvența de interval poate fi actualizată folosind funcția vl53l5cx_set_ranging_frequency_hz(). În mod implicit, frecvența de măsurare este setată la 1 Hz.
Modul de distanță
Modul de variație permite utilizatorului să aleagă între performanță ridicată sau consum redus de energie. Sunt propuse două moduri:
- Continuu: dispozitivul captează în mod continuu cadre cu o frecvență definită de utilizator. VCSEL este activat în timpul tuturor intervalelor, astfel încât distanța maximă și imunitatea ambientală sunt mai bune. Acest mod este recomandat pentru măsurători cu intervale rapide sau performanțe înalte.
- Autonom: acesta este modul implicit. Dispozitivul captează în mod continuu cadre cu o frecvență definită de utilizator. VCSEL este activat într-o perioadă definită de utilizator, folosind funcția vl53l5cx_set_integration_time_ms(). Deoarece VCSEL nu este întotdeauna activat, consumul de energie este redus. Beneficiile sunt mai evidente cu o frecvență redusă. Acest mod este recomandat pentru aplicații cu putere redusă.
Modul de ranging poate fi schimbat folosind funcția vl53l5cx_set_ranging_mode().
Timp de integrare
Timpul de integrare este o caracteristică disponibilă numai folosind modul de măsurare autonomă (consultați Secțiunea 4.5: Modul de măsurare). Acesta permite utilizatorului să schimbe ora în timp ce VCSEL este activat. Modificarea timpului de integrare dacă modul de măsurare este setat la continuu nu are efect. Timpul implicit de integrare este setat la 5 ms.
Efectul timpului de integrare este diferit pentru rezoluțiile 4×4 și 8×8. Rezoluția 4×4 este compusă dintr-un timp de integrare, iar rezoluția 8×8 este compusă din patru timpi de integrare. Următoarele cifre reprezintă emisia VCSEL pentru ambele rezoluții.
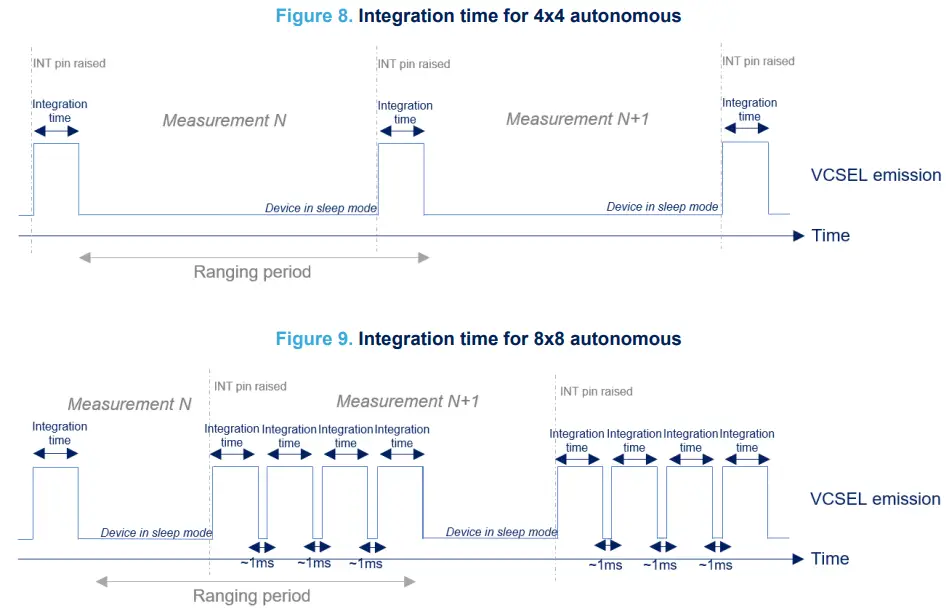
Suma tuturor timpilor de integrare + 1 ms overhead trebuie să fie mai mică decât perioada de măsurare. În caz contrar, perioada de interval este mărită automat.
Moduri de putere
Modurile de alimentare pot fi utilizate pentru a reduce consumul de energie atunci când dispozitivul nu este utilizat. VL53L5CX poate funcționa în unul dintre următoarele moduri de alimentare:
- Trezire: Dispozitivul este setat pe HP inactiv (putere mare), în așteptarea instrucțiunilor.
- Sleep: Dispozitivul este setat în LP inactiv (putere scăzută), starea de putere scăzută. Dispozitivul nu poate fi utilizat până când este setat în modul de trezire.
Acest mod păstrează firmware-ul și configurația.
Modul de alimentare poate fi schimbat folosind funcția vl53l5cx_set_power_mode(). Modul implicit este trezire.
Nota: Dacă utilizatorul dorește să schimbe modul de alimentare, dispozitivul nu trebuie să fie într-o stare de distanță.
Ascuţitoare
Semnalul returnat de la o țintă nu este un puls curat cu margini ascuțite. Marginile se înclină și pot afecta distanțele raportate în zonele adiacente. Ascuțitorul este folosit pentru a elimina o parte sau tot semnalul cauzat de o strălucire voalată.
ExampImaginea prezentată în figura următoare reprezintă o țintă apropiată la 100 mm centrată în FoV și o altă țintă, mai în urmă la 500 mm. În funcție de valoarea ascuțitorului, ținta apropiată poate apărea în mai multe zone decât cea reală.
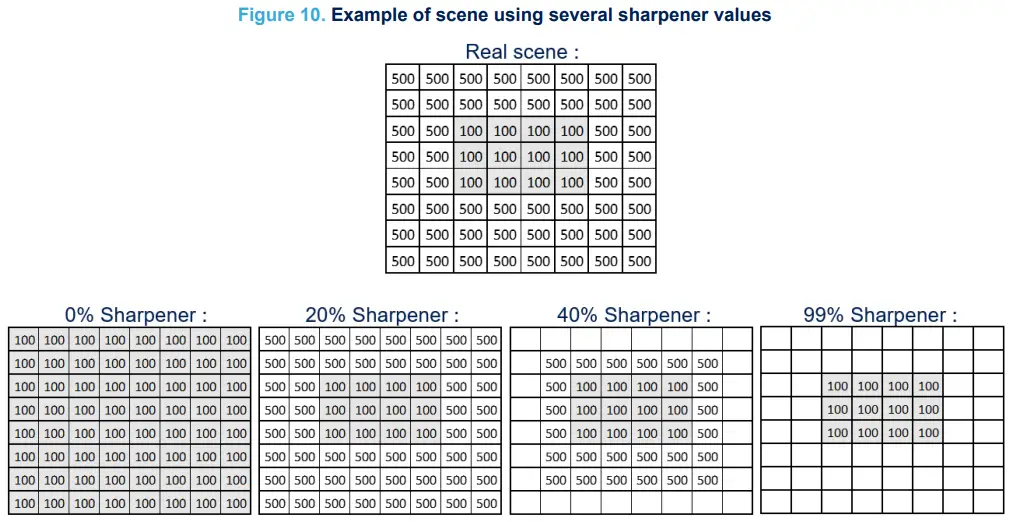
Ascuțitorul poate fi schimbat folosind funcția vl53l5cx_set_sharpener_percent(). Valorile permise sunt între 0% și 99%. Valoarea implicită este 5%.
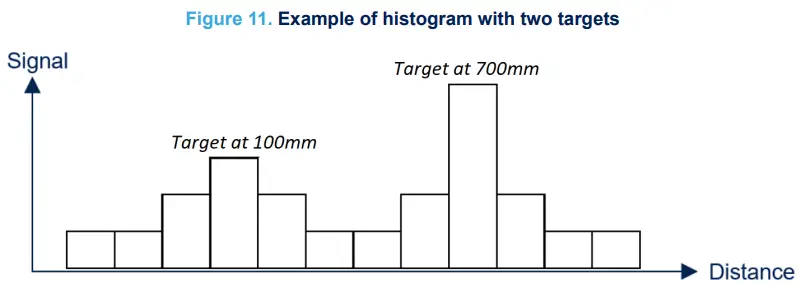
Ordine țintă
VL53L5CX poate măsura mai multe ținte pe zonă. Datorită procesării histogramei, gazda poate alege ordinea țintelor raportate. Există două opțiuni:
- Cea mai apropiată: cea mai apropiată țintă este prima raportată
- Cea mai puternică: cea mai puternică țintă este prima raportată
Ordinea țintă poate fi modificată folosind funcția vl53l5cx_set_target_order(). Ordinea implicită este cea mai puternică.
Example din figura următoare reprezintă detectarea a două ținte. Unul la 100 mm cu o reflectanță scăzută și unul la 700 mm cu o reflectanță ridicată.
Ținte multiple pe zonă
VL53L5CX poate măsura până la patru ținte pe zonă. Utilizatorul poate configura numărul de ținte returnate de senzor.
Nota: Distanța minimă dintre două ținte care trebuie detectate este de 600 mm.
Selectarea nu este posibilă de la șofer; trebuie făcut în „Platform.h” file. Macro-ul VL53L5CX_NB_ TARGET_PER_ZONE trebuie setat la o valoare între 1 și 4. Ordinea țintă descrisă în Secțiunea 4.9: Ordinea țintă afectează direct ordinea țintei detectate. În mod implicit, senzorul emite maximum o țintă pe zonă.
Nota: Un număr crescut de ținte pe zonă crește dimensiunea RAM necesară
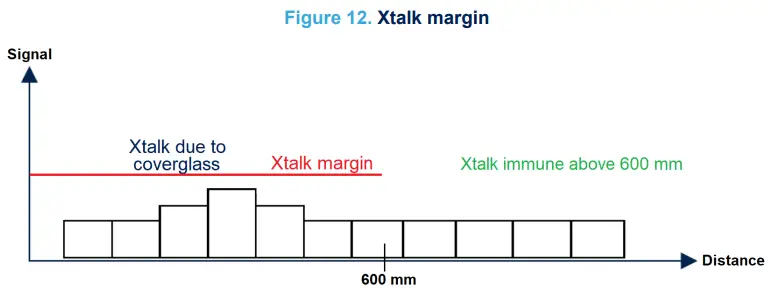
Marja Xtalk
Marja Xtalk este o caracteristică suplimentară disponibilă numai folosind pluginul Xtalk. .c și .f files „vl53l5cx_plugin_xtalk” trebuie folosit.
Marja este utilizată pentru a modifica pragul de detectare atunci când un geam de acoperire este prezent pe partea superioară a senzorului. Pragul poate fi crescut pentru a se asigura că geamul de acoperire nu este niciodată detectat, după setarea datelor de calibrare a diafoniei. De exampda, utilizatorul poate executa o calibrare de diafonie pe un singur dispozitiv și poate reutiliza aceleași date de calibrare pentru toate celelalte dispozitive. Marja Xtalk poate fi folosită pentru a regla corectarea diafoniei. Figura de mai jos reprezintă marginea Xtalk.
Praguri de detectare
Pe lângă capacitățile obișnuite de măsurare a distanței, senzorul poate fi programat să detecteze un obiect în conformitate cu anumite criterii predefinite. Această caracteristică este disponibilă folosind pluginul „praguri de detectare”, care este o opțiune neinclusă în mod implicit în API. The filetrebuie să fie utilizate cele numite „vl53l5cx_plugin_detection_thresholds”.
Caracteristica poate fi utilizată pentru a declanșa o întrerupere a pinului A3 (INT) atunci când sunt îndeplinite condițiile definite de utilizator. Există trei configurații posibile:
- Rezoluție 4×4: folosind un prag pe zonă (un total de 16 praguri)
- Rezoluție 4×4: folosind două praguri per zonă (un total de 32 de praguri)
- Rezoluție 8×8: folosind un prag pe zonă (un total de 64 praguri)
Indiferent de configurația folosită, procedura de creare a pragurilor și dimensiunea RAM sunt aceleași. Pentru fiecare combinație de prag, trebuie completate mai multe câmpuri: - Zone id: id-ul zonei selectate (consultați Secțiunea 2.2: Orientare efectivă)
- Măsurare: măsurarea de captare (distanță, semnal, număr de SPAD-uri, …)
- Tip: ferestre de măsurători (în ferestre, în afara ferestrelor, sub pragul scăzut, …)
- Prag scăzut: utilizator cu prag scăzut pentru declanșare. Utilizatorul nu trebuie să seteze formatul, acesta este gestionat automat de API.
- Prag înalt: utilizator cu prag înalt pentru declanșare. Utilizatorul nu trebuie să seteze formatul; este gestionat automat de API.
- Operațiune matematică: folosit doar pentru 4×4 – 2 combinații de prag pe zonă. Utilizatorul poate seta o combinație folosind mai multe praguri într-o zonă.
Indicator de mișcare
Senzorul VL53L5CX are o caracteristică firmware încorporată care permite detectarea mișcării într-o scenă. Indicatorul de mișcare este calculat între cadre secvențiale. Această opțiune este disponibilă folosind plugin-ul 'vl53l5cx_plugin_motion_indicator'.
Indicatorul de mișcare este inițializat folosind funcția vl53l5cx_motion_indicator_init(). Pentru a modifica rezoluția senzorului, actualizați rezoluția indicatorului de mișcare utilizând funcția dedicată: vl53l5cx_motion_indicator_set_resolution().
De asemenea, utilizatorul poate modifica distanțele minime și maxime pentru detectarea mișcării. Diferența dintre distanțele minime și maxime nu poate fi mai mare de 1500 mm. În mod implicit, distanțele sunt inițializate cu valori cuprinse între 400 mm și 1500 mm.
Rezultatele sunt stocate în câmpul „indicator de mișcare”. În acest câmp, matricea „mișcare” oferă o valoare care conține intensitatea mișcării pe zonă. O valoare ridicată indică o variație mare de mișcare între cadre. O mișcare tipică oferă o valoare între 100 și 500. Această sensibilitate depinde de timpul de integrare, distanța țintă și reflectanța țintei.
O combinație ideală pentru aplicațiile cu putere redusă este utilizarea indicatorului de mișcare cu modul de măsurare autonom și a pragurilor de detectare programate pe mișcare. Acest lucru permite detectarea variațiilor de mișcare în FoV cu un consum minim de energie.
Compensarea periodică a temperaturii
Performanța de variație este afectată de variațiile de temperatură. Senzorul VL53L5CX încorporează o compensare de temperatură care este calibrată o dată când începe streamingul. Cu toate acestea, dacă temperatura evoluează, este posibil ca compensarea să nu fie aliniată cu noua temperatură. Pentru a evita această problemă, clientul poate efectua o compensare periodică a temperaturii utilizând un VHV automat. Calibrarea periodică a temperaturii durează câteva milisecunde. Utilizatorul poate defini perioada.
Pentru a utiliza această funcție, clientul trebuie să:
• Apelați funcția vl53l5cx_set_VHV_repeat_count().
• Apoi, dați numărul de cadre dintre fiecare nouă calibrare ca argument.
Dacă argumentul este 0, compensația este dezactivată.
Rezultate variate
Date disponibile
O listă extinsă de date despre țintă și mediu poate fi scoasă în evidență în timpul activităților de distanță. Următorul tabel descrie parametrii disponibili pentru utilizator.
Masă 3. Ieșire disponibilă folosind senzorul VL53L5CX
| Element | Nb octeți (RAM) | Unitate | Descriere |
| Ambient per SPAD | 256 | Kcps/SPAD | Măsurarea ratei ambientale efectuată pe matricea SPAD, fără emisie de fotoni activi, pentru a măsura rata semnalului ambiental din cauza zgomotului. |
| Numărul de ținte detectate | 64 | Nici unul | Numărul de ținte detectate în zona curentă. Această valoare ar trebui să fie prima care trebuie verificată pentru a cunoaște validitatea măsurării. |
| Numărul de SPAD-uri activate | 256 | Nici unul | Numărul de SPAD-uri activate pentru măsurarea curentă. O țintă cu reflexie îndepărtată sau scăzută activează mai multe SPAD-uri. |
| Semnal pe SPAD | 256 x nb ținte programate | Kcps/SPAD | Cantitatea de fotoni măsurată în timpul impulsului VCSEL. |
| Gama sigma | 128 x nb ținte programate | Milimetru | Estimator Sigma pentru zgomotul pe distanța țintă raportată. |
| Distanţă | 128 x nb ținte programate | Milimetru | Distanța țintă |
| Starea țintă | 64 x nb ținte programate | Nici unul | Valabilitatea măsurătorilor. Vedea Secțiunea 5.5: Rezultate interpretare pentru mai multe informații. |
| Reflectanta | 64 x număr ținte programate | La sută | Reflexia țintă estimată în procente |
| Indicator de mișcare | 140 | Nici unul | Structură care conține rezultatele indicatorului de mișcare. Câmpul „mișcare” conține intensitatea mișcării. |
Nota: Pentru mai multe elemente (semnal per spad, sigma, …) accesul la date este diferit dacă utilizatorul a programat mai mult de o țintă pe zonă (vezi Secțiunea 4.10: Ținte multiple pe zonă). Vezi exampcodurile le pentru mai multe informații.
Personalizați selecția de ieșire
În mod implicit, toate ieșirile VL53L5CX sunt activate. Dacă este necesar, utilizatorul poate dezactiva unele ieșiri ale senzorului.
Dezactivarea măsurătorilor nu este disponibilă pe driver; trebuie efectuată în „Platform.h” file. Utilizatorul poate declara următoarele macrocomenzi pentru a dezactiva ieșirile:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
În consecință, câmpurile nu sunt declarate în structura rezultatelor, iar datele nu sunt transferate către gazdă. Dimensiunea RAM și dimensiunea I²C sunt reduse.
Pentru a asigura coerența datelor, ST recomandă întotdeauna menținerea „numărului de ținte detectate” și „starea țintei” activate. Aceasta filtrează măsurătorile în funcție de starea țintei (consultați Secțiunea 5.5: Interpretarea rezultatelor).
Obținerea unor rezultate variate
În timpul sesiunii de măsurare, există două moduri de a afla dacă sunt disponibile date noi de măsurare:
- Modul de sondare: folosește continuu funcția vl53l5cx_check_data_ready(). Detectează un nou număr de fluxuri returnat de senzor.
- Modul de întrerupere: așteaptă o întrerupere ridicată pe pinul A3 (GPIO1). Întreruperea este ștearsă automat după ~100 μs.
Când date noi sunt gata, rezultatele pot fi citite folosind funcția vl53l5cx_get_ranging_data(). Returnează o structură actualizată care conține toate rezultatele selectate. Deoarece dispozitivul este asincron, nu există nicio întrerupere de șters pentru a continua sesiunea de control.
Această caracteristică este disponibilă atât pentru modul continuu, cât și pentru modul autonom.
Folosind formatul de firmware brut
După transferul de date prin I²C, are loc o conversie între formatul firmware și formatul gazdă. Această operație este de obicei efectuată pentru a avea o distanță în milimetri ca ieșire implicită a senzorului. Dacă utilizatorul dorește să folosească formatul de firmware, următoarea macrocomandă trebuie definită în platformă file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
Interpretarea rezultatelor
Datele returnate de VL53L5CX pot fi filtrate pentru a ține cont de starea țintei. Starea indică validitatea măsurării. Lista completă a stării este descrisă în tabelul următor.
Masă 4. Lista stării țintei disponibile
| Starea țintă | Descriere |
| 0 | Datele nu sunt actualizate |
| 1 | Rata semnalului prea scăzută pe matricea SPAD |
| 2 | Faza țintă |
| 3 | Estimatorul Sigma este prea mare |
| 4 | Consecvența țintei a eșuat |
| 5 | Interval valabil |
| 6 | Încheierea nu a fost efectuată (de obicei, primul interval) |
| 7 | Consecvența ratei a eșuat |
| 8 | Rata semnalului prea scăzută pentru ținta actuală |
| 9 | Interval valabil cu puls mare (se poate datora unei ținte îmbinate) |
| 10 | Interval valid, dar nu a fost detectată nicio țintă la intervalul anterior |
| 11 | Consecvența măsurătorilor a eșuat |
| 12 | Țintă neclară de alta, datorită ascuțitorului |
| 13 | Țintă detectată, dar date inconsecvente. Se întâmplă frecvent pentru ținte secundare. |
| 255 | Nicio țintă detectată (doar dacă numărul de ținte detectate este activat) |
Pentru a avea date consistente, utilizatorul trebuie să filtreze starea țintei nevalide. Pentru a oferi un rating de încredere, o țintă cu statutul 5 este considerată 100% validă. Un statut de 6 sau 9 poate fi considerat cu o valoare de încredere de 50%. Toate celelalte stări sunt sub nivelul de încredere de 50%.
Erori de șofer
Când apare o eroare folosind senzorul VL53L5CX, driverul returnează o anumită eroare. Următorul tabel listează erorile posibile.
Masă 5. Lista erorilor disponibile folosind driverul
| Starea țintă | Descriere |
| 0 | Nicio eroare |
|
127 |
Utilizatorul a programat o setare incorectă
(rezoluție necunoscută, frecvență de interval prea mare, …) |
| 255 | Eroare majoră. De obicei, o eroare de timeout, din cauza unei erori I²C. |
| alte | Combinație de erori multiple descrise mai sus |
Nota: Gazda poate implementa mai multe coduri de eroare folosind platforma files.
Istoricul reviziilor
Masă 6. Istoricul revizuirilor documentelor
| Data | Versiune | Schimbări |
| 21-Iun-2021 | 1 | Lansare inițială |
| 30-aug-2021 | 2 | Adăugat Secțiunea 5.4: Utilizarea formatului de firmware brut
S-a adăugat un nou statut țintă 13 in Tabelul 4. Lista stărilor țintelor disponibile |
| 05-sept-2022 | 3 | S-a adăugat o notă despre distanța minimă minimă dintre ținte la Secțiunea 4.10: Ținte multiple pe zonă |
| 10-aug-2023 | 4 | Modificat Figura 11. Exampchiul histogramei cu două ținte |
| 21-feb-2024 | 5 | S-a adăugat VHV (vol foarte maretage) la Secțiunea 1: Acronime și abrevieri. Adăugat Secțiunea 4.14: Compensarea periodică a temperaturii |
NOTIFICARE IMPORTANT – CITIȚI CU ATENTIE
STMicroelectronics NV și filialele sale („ST”) își rezervă dreptul de a face modificări, corecții, îmbunătățiri, modificări și îmbunătățiri produselor ST și/sau acestui document în orice moment, fără notificare. Cumpărătorii trebuie să obțină cele mai recente informații relevante despre produsele ST înainte de a plasa comenzi. Produsele ST sunt vândute în conformitate cu termenii și condițiile de vânzare ale ST în vigoare la momentul confirmării comenzii.
Cumpărătorii sunt singurii responsabili pentru alegerea, selecția și utilizarea produselor ST, iar ST nu își asumă nicio responsabilitate pentru asistența la aplicare sau proiectarea produselor cumpărătorilor.
Nicio licență, expresă sau implicită, pentru niciun drept de proprietate intelectuală nu este acordată de către ST prin prezenta.
Revânzarea produselor ST cu prevederi diferite de informațiile prezentate aici va anula orice garanție acordată de ST pentru un astfel de produs.
ST și sigla ST sunt mărci comerciale ale ST. Pentru informații suplimentare despre mărcile comerciale ST, consultați www.st.com/trademarks. Toate celelalte nume de produse sau servicii sunt proprietatea proprietarilor respectivi.
Informațiile din acest document înlocuiesc și înlocuiesc informațiile furnizate anterior în orice versiuni anterioare ale acestui document.
© 2024 STMicroelectronics – Toate drepturile rezervate

Documente/Resurse
 |
STMicroelectronics VL53L5CX Senzor de măsurare a timpului de zbor multizonă [pdfManual de utilizare VL53L5CX Senzor de măsurare a timpului de zbor cu mai multe zone, VL53L5CX, Senzor de măsurare a timpului de zbor în mai multe zone, Senzor de măsurare a timpului de zbor, Senzor de distanță a zborului, Senzor de distanță, Senzor |



