![]()
Driver pas cu buclă închisă T86-IO
Manual de utilizare
Shenzhen Rtelligent Mechanical Electrical Technology Co., Ltd
Produs terminatview
Vă mulțumim că ați ales Rtelligent T series servo driver digital pas cu pas. Servo-pas este o schemă de motor pas cu pas formată pe baza motorului pas cu buclă deschisă comun în combinație cu feedback de poziție și algoritm servo, care oferă viteză mare, cuplu mare, precizie ridicată, vibrații scăzute, încălzire scăzută și fără pierderi de pas. Bazat pe noua platformă de cip de procesare DSP pe 32 de biți a TI, servo driverul pas cu pas seria T folosește controlul orientat pe câmp (FOC) și algoritmul de control al slăbirii câmpului vectorial în servo driver, care are performanța de a depăși stepper-ul obișnuit în toate aspectele. .
- Funcția de ajustare a parametrilor PID încorporată face ca motorul să îndeplinească mai bine aplicarea diferitelor tipuri de sarcini.
- Algoritmul de control al slăbirii câmpului încorporat face ca motorul să reducă caracteristicile câmpului magnetic și să mențină puterea la viteză mare.
- Funcția de control vectorială a curentului încorporată face ca motorul să aibă caracteristica curentă de servo și încălzire scăzută.
- Algoritmul de comandă micro-pas încorporat face ca motorul să poată funcționa în același timp menținând o vibrație stabilă și scăzută la diferite viteze.
- Feedback-ul codificatorului cu rezoluția încorporată de 4000 de impulsuri face ca precizia de poziționare să crească și nu pierde niciodată pasul.
În concluzie, schema de control servo, combinată cu caracteristicile motorului pas cu pas, permite servomotorului pas cu pas seria T să exercite mai bine performanța motorului pas cu pas, care poate înlocui aplicarea servo a aceleiași puteri. Este o nouă alegere de performanță optimă a costurilor pentru echipamentele de automatizare.
Driverul T86-IO poate seta subdiviziunea și alți parametri prin comutatorul DIP și software-ul de depanare. Are funcții de protecție precum voltage, curent și poziție și adaugă interfață de ieșire de alarmă. Semnalele sale de control de intrare și ieșire sunt izolate optic.
| Alimentare electrică | 20-80 VAC 24 –100 VDC |
| Precizie de control | 4000 Impuls/r |
| Controlul curentului | Algoritm de control servo vector |
| Setări de viteză | Setarea comutatorului DIP sau setarea software-ului de depanare |
| Gama de viteze | Convențional 1200 ~ 1500rpm, până la 4000rpm |
| Suprimarea rezonanței | Calculați automat punctul de rezonanță și inhibați vibrația IF |
| Reglarea parametrilor PID | Testați software-ul pentru a regla caracteristicile PID ale motorului |
| Filtrarea impulsurilor | Filtru de semnal digital de 2MHz |
| Ieșire de alarmă | Ieșire de alarmă de supracurent, supravoltage, eroare de poziție etc |
Sperăm că produsele noastre cu performanțe excelente vă pot ajuta să finalizați cu succes programul de control sportiv.
Vă rugăm să citiți acest manual tehnic înainte de a utiliza produsele.
Mediu de aplicație și instalare
Cerință de mediu
| Articol | Rinteligent T86-IO |
| Mediul de instalare | Evitați praful, uleiul și mediul coroziv |
| Vibrație | 0.5G(4.9m/s2)Max |
| Temperatura/umiditatea de functionare | 0℃ ~ 45℃ / 90% RH sau mai puțin (fără condensare) |
| Temperatura de depozitare și transport: | -10℃ ~ 70℃ |
| Răcire | Răcire naturală / departe de sursa de căldură |
| Grad rezistent la apa | IP54 |
Dimensiunile de instalare a driverului

Cerințe de instalare a driverului
Vă rugăm să instalați driverul vertical sau orizontal, cu partea din față în față, cu partea superioară în sus pentru a facilita răcirea.
În timpul asamblarii, evitați găuririle și alte corpuri străine care cad în interiorul șoferului.
În timpul asamblarii, vă rugăm să utilizați șurubul M3 pentru a fixa.
Când există o sursă de vibrații (cum ar fi o mașină de găurit) aproape de poziția de instalare, vă rugăm să utilizați un absorbant de vibrații sau o garnitură de cauciuc rezistentă la vibrații.
Când mai multe drivere sunt instalate în dulapul de control, vă rugăm să acordați atenție să rezervați suficient spațiu pentru o disipare suficientă a căldurii. Dacă este necesar, puteți configura ventilatoare de răcire pentru a asigura condiții bune de disipare a căldurii în dulapul de comandă.
Port driver și conexiune
Descrierea funcției portului
| Funcţie | Nota | Definiţie | Remarci |
| Intrare sursă de alimentare | AC | Alimentare de intrare AC | AC 20-80V DC 24-100V |
| AC | Alimentare de intrare AC | ||
| Conexiune motor | A+ | Terminalul pozitiv al înfășurării fazei A | Roşu |
| A- | Borna negativă a înfășurării fazei A | Galben | |
| B+ | Borna pozitivă a înfășurării fazei B | Negru | |
| B- | Borna negativă a înfășurării fazei B | Verde | |
| Conexiune codificator | EB+ | Terminalul pozitiv al fazei B a codificatorului | Verde |
| EB- | Terminalul negativ al fazei B a codificatorului | Galben | |
| EA+ | Terminalul pozitiv al fazei A a codificatorului | Maro | |
| EA- | Terminalul negativ al fazei A a codificatorului | Alb | |
| VCC | Puterea de lucru a codificatorului 5V pozitiv | Roşu | |
| GND | Puterea de lucru a codificatorului borna de masă 5V | Albastru | |
| Conexiune puls | PUL+ | Porniți interfața de intrare | Nivel 24V |
| PUL- | |||
| D1R+ | Interfață de introducere a direcției | ||
| DIR- | |||
| Activați terminalul | ENA+ | Activați interfața de control | |
| ENA- | |||
| Ieșire Mann | ALM+ | Interfață de ieșire Mann | 24V. de mai jos |
| ALM- | |||
| Ieșire în loc | Pend+ | 40mA Interfață de ieșire pe loc | |
| în așteptare- |
Intrare sursă de alimentare
Sursa de alimentare a driverului poate fi atât AC cât și DC, iar volumul de intraretagIntervalul este 20V~80VAC sau 24V~100VDC.
Vă rugăm să nu vă conectați direct la electricitate comercială (220VAC)!
Referință pentru selecția puterii:
Voltage:
Motorul pas cu pas are caracteristicile scăderii cuplului odată cu creșterea vitezei motorului, iar volumul de intraretage va afecta ampcantitatea de reducere a cuplului la viteză mare. Creșterea corectă a volumuluitage din sursa de alimentare de intrare poate crește cuplul de ieșire al motorului la viteză mare.
Servo stepper are o ieșire de viteză și cuplu mai mare decât stepper-ul obișnuit. Prin urmare, dacă doriți să obțineți o performanță mai bună la viteză mare, trebuie să creșteți volumul sursei de alimentaretage a şoferului.
Actual:
Procesul de lucru al driverului este de a converti intrarea de volum maretage și alimentare cu curent scăzut în low-voltage și curent mare la ambele capete ale înfășurării motorului. În timpul utilizării efective, sursa de alimentare adecvată trebuie selectată în funcție de modelul motorului, cuplul de sarcină și alți factori.
Efectele regenerării voltage:
Când motorul pas cu pas funcționează, păstrează și caracteristicile generatorului. La decelerare, energia cinetică acumulată de sarcină va fi convertită în energie electrică și suprapusă circuitului driverului și sursei de alimentare de intrare.
Acordați atenție setării timpului de accelerare și decelerare pentru a proteja șoferul sau sursa de alimentare.
Când șoferul este oprit, veți vedea indicatorul LED al șoferului aprins atunci când sarcina este trasă pentru a face motorul să se miște, care este, de asemenea, afectat de acest lucru.
Conexiune codificator
Encoderul T86-IO este ieșire diferențială A/B și este conectat în ordinea corespunzătoare atunci când este utilizat.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| Verde | Galben | Maro | Alb | Roşu | Albastru |
Rtelligent este echipat cu o anumită lungime a cablului codificatorului. Vă rugăm să cumpărați cabluri prelungitoare de lungimi diferite în funcție de nevoile de instalare.
Conexiune motor
Motorul potrivit al driverului T86-IO este servomotorul pas cu pas din seria T corespunzător, iar ordinea corespunzătoare de conectare a motorului este fixă și unică.

| A+ | Roşu |
| A- | Galben |
| B+ | Negru |
| B- | Verde |
Conexiune semnal de control
Port PUL, DIR: conexiune pentru comanda de pornire și oprire
| și indicarea direcției | 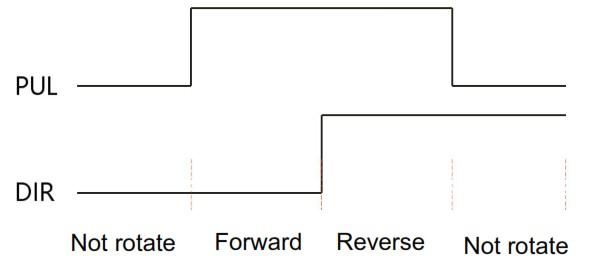 |
| 1. La PUL pornit și DIR oprit, motorul este declanșat să se rotească înainte. Când PUL este oprit, motorul decelerează și se oprește. 2. La PUL pornit și DIR pornit, motorul este declanșat să se rotească înapoi. Când PUL este oprit, motorul decelerează și se oprește. 3.La oprirea PUL, motorul se oprește. |
Port ENA: activare/dezactivare
Când optocuplerul intern este oprit, driverul emite curent către motor;
Când optocuplerul intern este pornit, șoferul va întrerupe curentul fiecărei faze a motorului pentru a elibera motorul, iar impulsul de pas nu va fi răspuns.
Când motorul se află într-o stare de eroare, acesta este oprit automat. Logica de nivel a semnalului de activare poate fi setată la opus.
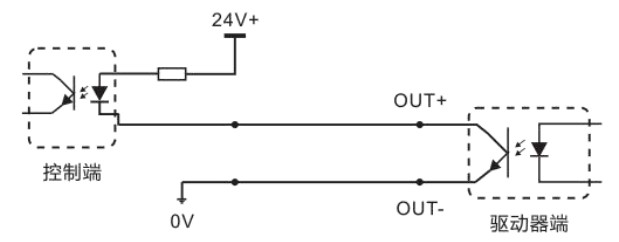
ALM, Pend port: folosit pentru alarmă și ieșire pe loc.
Portul ALM este utilizat pentru a transmite starea de funcționare a driverului către un circuit de control extern. Când driverul este în starea de eroare și în starea normală de lucru, ALM emite diferite niveluri de optocupler.
Portul Pend este folosit pentru a scoate semnalul driverului la locul lui. Când diferența (deviația de poziție) dintre poziția de comandă a pulsului trimisă de computerul superior și poziția curentă a servomotorului pas cu pas este mai mică decât valoarea setată, se iese semnalul pe loc. Calculatorul superior primește semnalul și confirmă că poziționarea este completă.
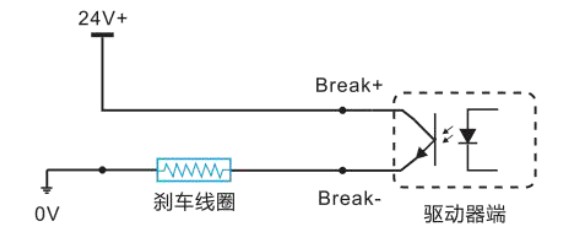
În plus, porturile ALM și Pend pot fi reutilizate ca semnal de control al frânei (ruperea) prin reglarea software, care este utilizat pentru a controla comutatorul de frână al servomotorului pas cu frână. Deoarece bobina de frână este o sarcină inductivă, iar încălzirea bobinei este gravă atunci când motorul funcționează, clienții pot selecta controler special de frână în funcție de nevoile lor pentru a reduce încălzirea frânei și pentru a îmbunătăți viața și fiabilitatea.
 Rtelligent oferă soluții pentru controlerele de frână dedicate, exampfișierele sunt după cum urmează:
Rtelligent oferă soluții pentru controlerele de frână dedicate, exampfișierele sunt după cum urmează:
Port serial RS232

| S/N | Simbol | Descriere |
| 1 | NC | |
| 2 | +5V | Borna pozitivă a sursei de alimentare |
| 3 | TxD | Terminal de transmisie RS232 |
| 4 | GND | Borna de împământare a sursei de alimentare |
| 5 | RxD | Terminal de recepție RS232 |
| 6 | NC |
Portul serial RS232 este utilizat pentru a conecta software-ul de testare T86-IO și pentru a modifica alți parametri de funcționare ai driverului.
Setarea comutatoarelor DIP și a parametrilor de funcționare

Setarea vitezei
| Viteză | SVV1 | SW2 | SW3 | SW4 | Remarci |
| 100 | on | on | on | on | Alte viteze pot fi personalizate |
| 150 | oprit | on | on | on | |
| 200 | on | oprit | on | on | |
| 250 | oprit | oprit | on | on | |
| 300 | on | on | oprit | on | |
| 400 | oprit | on | oprit | on | |
| 500 | on | oprit | oprit | on | |
| 600 | oprit | oprit | oprit | on | |
| 700 | on | on | on | oprit | |
| 800 | oprit | on | on | oprit | |
| 900 | on | oprit | on | oprit | |
| 1000 | oprit | oprit | on | oprit | |
| 1100 | on | on | oprit | oprit | |
| 1200 | oprit | on | oprit | oprit | |
| 1300 | on | oprit | oprit | oprit | |
| 1400 | oprit | oprit | oprit | oprit |
Selectarea direcției motorului
DIP SW5 este utilizat pentru a seta direcția de funcționare a motorului sub impulsul inițial. „Oprit” înseamnă că direcția motorului este în sens invers acelor de ceasornic la introducerea impulsului inițial; „Pornit” înseamnă că direcția motorului este în sensul acelor de ceasornic la introducerea impulsului inițial. Pulsul inițial este pulsul de testare utilizat la dezvoltarea software-ului driverului; Vă rugăm să consultați direcția reală de funcționare a motorului.
Selectare buclă deschisă/închisă
DIP SW8 este folosit pentru a seta modul de control al șoferului.
„Oprit” înseamnă modul de control în buclă închisă;
„Pornit” înseamnă modul de control în buclă deschisă și poate fi folosit pentru a testa motorul.
Indicație LED pentru starea de funcționare a șoferului
| Stare LED | Starea șoferului | |
| Indicatorul verde este aprins mult timp | Driverul nu este activat | |
| Indicatorul verde pâlpâie | Șoferul funcționează normal | |
| Un indicator verde și un indicator roșu | Supracurent șofer | |
| Un indicator verde și doi indicatori roșii | Puterea de intrare a driverului supravoltage | |
| Un indicator verde și trei indicatori roșii | Volumul interntage din șofer greșește | |
| Un indicator verde și patru roșii | Eroarea de urmărire depășește limitele | |
| Un indicator verde și cinci roșii | Eroare de fază a codificatorului | |
Defecțiuni comune și depanare
| Fenomen | Situații posibile | Soluții |
| Motorul nu functioneaza | Indicatorul de alimentare este oprit | Verificați circuitul de alimentare pentru alimentarea normală |
| Rotorul motorului este blocat, dar motorul nu funcționează | Semnalul pulsului este slab; crește curentul semnalului la 7-16mA | |
| Viteza este prea mică | Selectați micro-pasarea potrivită | |
| Șoferul este protejat | Rezolvați alarma și reporniți | |
| Activați problema semnalului | Trageți în sus sau deconectați semnalul de activare | |
| Pulsul de comandă este incorect | Verificați dacă computerul superior are ieșire de impuls | |
| Direcția motorului este greșită | Sensul de rotație al motorului este invers | Reglați DIP SW5 |
| Cablul motorului este deconectat | Verificați conexiunea | |
| Motorul are o singură direcție | Eroare în modul Pulse sau port DIR deteriorat | |
| Indicatorul de alarmă este pornit | Conexiunea motorului este greșită | Verificați conexiunea motorului |
| Conexiunea motorului și conexiunea codificatorului sunt greșite | Verificați secvența conexiunii codificatorului | |
| Voltage este prea mare sau prea scăzută | Verificați sursa de alimentare | |
| Poziția sau viteza este greșită | Semnalul este perturbat | Eliminați interferențele pentru o împământare fiabilă |
| Introducerea comenzii este incorectă | Verificați instrucțiunile de sus ale computerului pentru a vă asigura că ieșirea este corectă | |
| Setarea impulsului pe rotație este greșită | Verificați starea comutatorului DIP și conectați corect comutatoarele | |
| Semnalul codificatorului este anormal | Înlocuiți motorul și contactați producătorul | |
| Terminalul șoferului ars |
Scurtcircuit între terminale circuit |
Verificați polaritatea alimentării sau scurtcircuitul extern |
| Rezistența internă între terminale este prea mare | Verificați dacă există vreo bilă de lipit din cauza adăugării excesive de lipit la conexiunile firelor | |
| Motorul este oprit toleranţă |
Timpul de accelerare și decelerare este prea scurt | Reduceți accelerația comenzii sau creșteți parametrii de filtrare a șoferului |
| Cuplul motorului este prea mic | Selectați motorul cu cuplu mare | |
| Sarcina este prea grea | Verificați greutatea și calitatea sarcinii și reglați structura mecanică | |
| Curentul de alimentare este prea mic | Înlocuiți sursa de alimentare adecvată |
Anexa A. Clauza de Garanție
A.1 Perioada de garanție: 12 luni
Oferim asigurare a calității timp de un an de la data livrării și servicii de întreținere gratuite pentru produsele noastre în perioada de garanție.
A.2 Excludeți următoarele:
- Conexiunea necorespunzătoare, cum ar fi polaritatea sursei de alimentare este inversată și introduceți/trageți conexiunea motorului atunci când sursa de alimentare este conectată.
- Dincolo de cerințele electrice și de mediu.
- Schimbați dispozitivul intern fără permisiune.
A.3 Procesul de întreținere
Pentru întreținerea produselor, vă rugăm să urmați procedurile prezentate mai jos:
- Contactați personalul nostru de asistență pentru clienți pentru a obține permisiunea de reluare.
- La mărfuri se anexează documentul scris al fenomenului de defecțiune a șoferului, precum și informațiile de contact și metodele de trimitere prin poștă ale expeditorului.
Adresa poștală:
Cod poștal:
Tel.:
szruitech.com
Documente/Resurse
 |
Driver pas cu buclă închisă RTELLIGENT T86-IO [pdfManual de utilizare T86-IO, Driver pas cu buclă închisă, Driver pas cu buclă închisă T86-IO |



