Robot ROBOWORKS N10 Robot mobil programabil educațional

Specificații
| Numele produsului | Raportul de reducere a motorului | Viteza maxima | Greutate | Sarcină utilă maximă | Dimensiune | Raza de viraj minimă |
|---|---|---|---|---|---|---|
| Robotul 2 | 1:27 | 1.3 m/s | 5.92 kg | 16 kg | 445*360*206mm | 0.77m |
| Rosbot Pro | 1:18 | 1.65 m/s | 19.54 kg | 35 kg | 774*570*227mm | 1.02m |
| Rosbot Plus | 1:18 | 2.33 m/s | 35.16 kg | 22 kg | 766*671*319mm | 1.29m |
Durata de viață a bateriei și sursa de alimentare:
- Robot 2: aproximativ 9.5 ore (fără încărcare), aproximativ 8.5 ore (încărcare completă)
- Robot Pro: aproximativ 4.5 ore (fără încărcare), aproximativ 3 ore (încărcare completă)
- Alimentare: baterie 24v 6000 mAh + încărcător inteligent curent 3A
Sistem de direcție și conducere:
Componentele cheie includ:
- Sistem de direcție: Servo digital cu cuplu S20F de 20 kg
- Roți: WH060 Servo digital cu cuplu de 60 kg, roți din cauciuc solid cu diametrul de 125 mm pentru Rosbot 2, roți din cauciuc solid cu diametrul de 150 mm pentru Robot Pro și
- Encoder: encoder de înaltă precizie cu fază AB de 500 de linii
- Sistem de suspensie: sistem de suspensie coaxial pendular pentru Robot 2, sistem de suspensie independent de 4 W pentru Robot Pro și
- Interfață de control: Aplicație iOS și Android prin Bluetooth sau Wifi, PS2, CAN, Port serial, USB
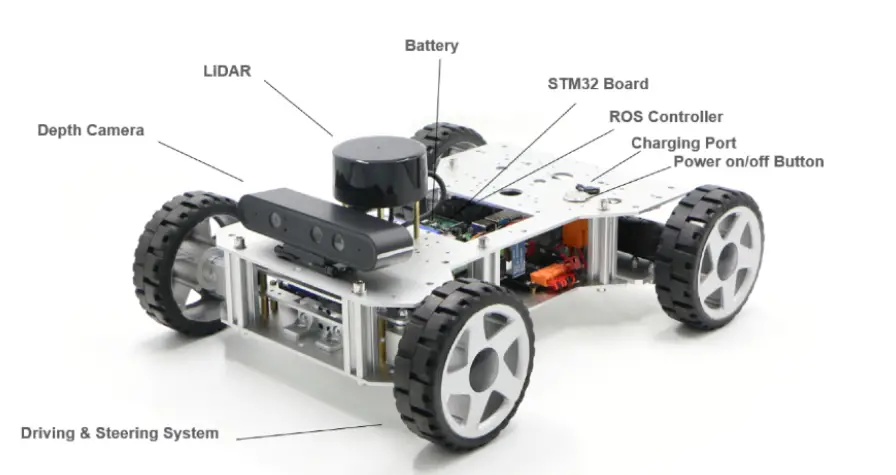
Introducere în controlerele ROS:
Toate RRoboții sunt echipate cu o cameră de adâncime Orbbec Astra pentru diverse utilizări, inclusiv controlul gesturilor, urmărirea scheletului și scanarea 3D.
Placa STM32:
Placa dispune de un nucleu STM32F103RC cu diverse funcționalități, inclusiv memorii, ceas, resetare și gestionarea aprovizionării, DMA de alimentare, modul de depanare, porturi I/O, temporizatoare și interfață de comunicare.
Întrebări frecvente
Î: Cum încarc bateria?
R: Folosiți încărcătorul inteligent de curent de 3A furnizat cu bateria de 24v 6000mAh pentru a încărca RRobot
Î: Care este durata de viață a bateriei Rosbot Pro?
R: Robot Pro are o durată de viață a bateriei de aproximativ 4.5 ore fără încărcare și aproximativ 3 ore în condiții de încărcare maximă.
Î: Pot controla Rosbot folosind un smartphone?
R: Da, puteți controla Rosbot folosind aplicația iOS și Android prin Bluetooth sau Wifi.
Componenta cheie
| Varia%on | Imagine |
| Robotul 2 |  |
| Robot Pro |  |
| Robot Plus |  |
Specificațiile produsului
|
Matricea produselor |
 |
 |
 |
| Numele produsului | Robotul 2 | Robot Pro | Robot Plus |
| Raportul de reducere a motorului | 1:27 | 1:18 | 1:18 |
| Viteza maxima | 1.3 m/s | 1.65 m/s | 2.33 m/s |
| Greutate | 5.92 kg | 19.54 kg | 35.16 kg |
| Sarcină utilă maximă | 16 kg | 35 kg | 22 kg |
| Dimensiune | 445*360*206mm | 774*570*227mm | 766*671*319mm |
| Raza de viraj minimă | 0.77m | 1.02m | 1.29m |
| Durata de viață a bateriei | Aproximativ 9.5 ore (fără încărcare), aproximativ 8.5 ore (încărcare completă) | Aproximativ 4.5 ore (fără încărcare), aproximativ 3 ore (încărcare completă) | |
| Alimentare electrică | Baterie 24v 6000 mAh + încărcător inteligent curent 3A | ||
| Sistemul de directie | S20F Servo digital cuplu de 20 kg | WH060 Servo digital cuplu de 60 kg | |
| Rotile | Roți din cauciuc masiv cu diametrul de 125 mm | Roți din cauciuc masiv cu diametrul de 150 mm | Roți gonflabile din cauciuc de 254 mm |
| Codificator | Encoder de înaltă precizie cu fază AB de 500 de linii | ||
| Sistem de suspensie | Sistem de suspendare coaxial pendular | Sistem de suspensie independent de 4W | |
| Interfață de control | Aplicație iOS și Android prin Bluetooth sau Wifi, PS2, CAN, Port serial, USB | ||
Introducerea controlerelor ROS
Există 2 tipuri de controlere ROS disponibile pentru utilizare cu RRobot bazat pe platforma Vidia Jetson. Jetson Orin Nano este mai potrivit pentru cercetare și educație. Jetson Orin NX este ideal pentru prototiparea produselor și aplicații comerciale. Următorul tabel ilustrează principalele diferențe tehnice dintre diferitele controlere disponibile de la Roboworks. Ambele plăci permit calcul la nivel înalt și sunt potrivite pentru aplicații robotice avansate, cum ar fi viziunea computerizată, învățarea profundă și planificarea mișcării.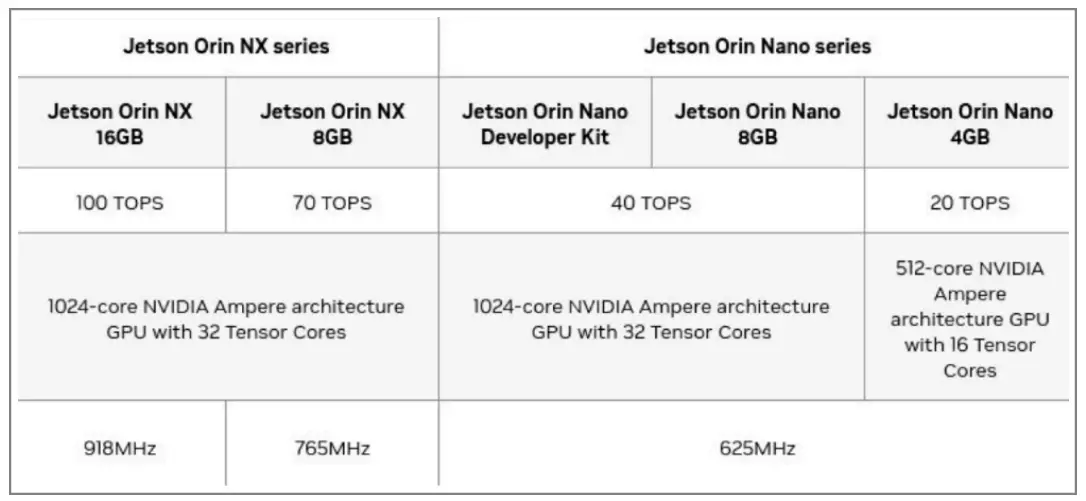
Sistem de detectare: LiDAR și cameră de adâncime
Un Leishen LSLiDAR este instalat pe toate variantele Rosbot, fiind utilizat fie modelul N10, fie M10. Aceste LLiDAR oferă o scanare de 3360-3360 de grade și percepția împrejurimilor și se laudă cu un ESI compact și ușor. Au un raport de zgomot semnal ridicat și o performanță excelentă de detectare pe obiecte cu reflexie ridicată/scăzută și funcționează bine în condiții de lumină puternică. Au o rază de detectare de 30 de metri și o frecvență de scanare de 12 Hz. Acest LiDAR se integrează perfect în roboți, asigurând că toate utilizările de cartografiere și navigație pot fi realizate cu ușurință în proiectul dvs. Tabelul de mai jos rezumă specificațiile tehnice ale glisoarelor: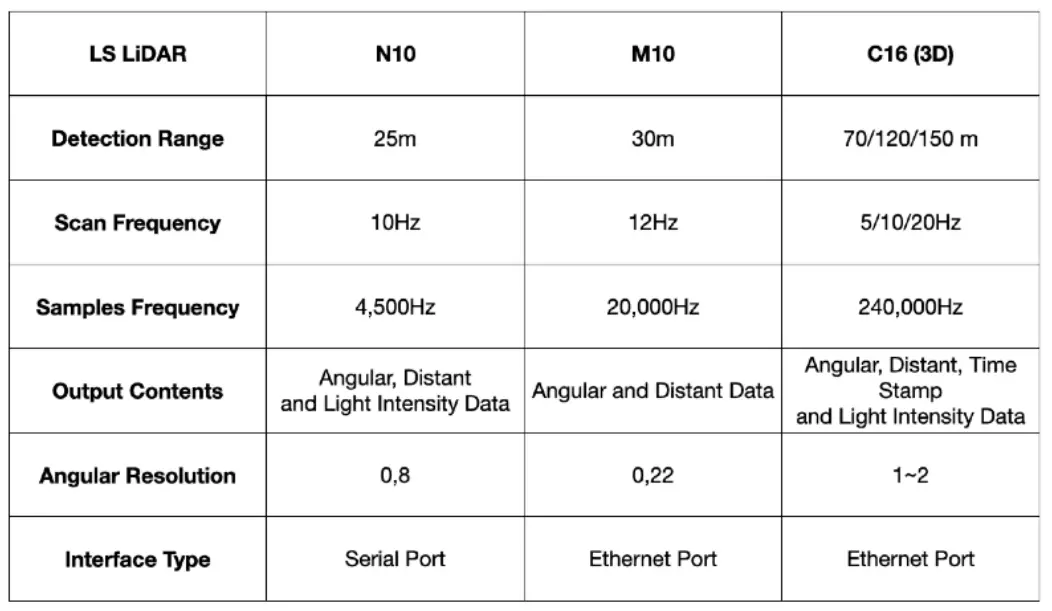
În plus, toți roboții sunt echipați cu o cameră de adâncime Orbbec Astra, care este o cameră RGBD. Această cameră este optimizată pentru o gamă largă de utilizări, inclusiv controlul gesturilor, urmărirea scheletului, scanarea 3D și dezvoltarea norului de puncte. Următorul tabel rezumă caracteristicile tehnice ale camerei de adâncime.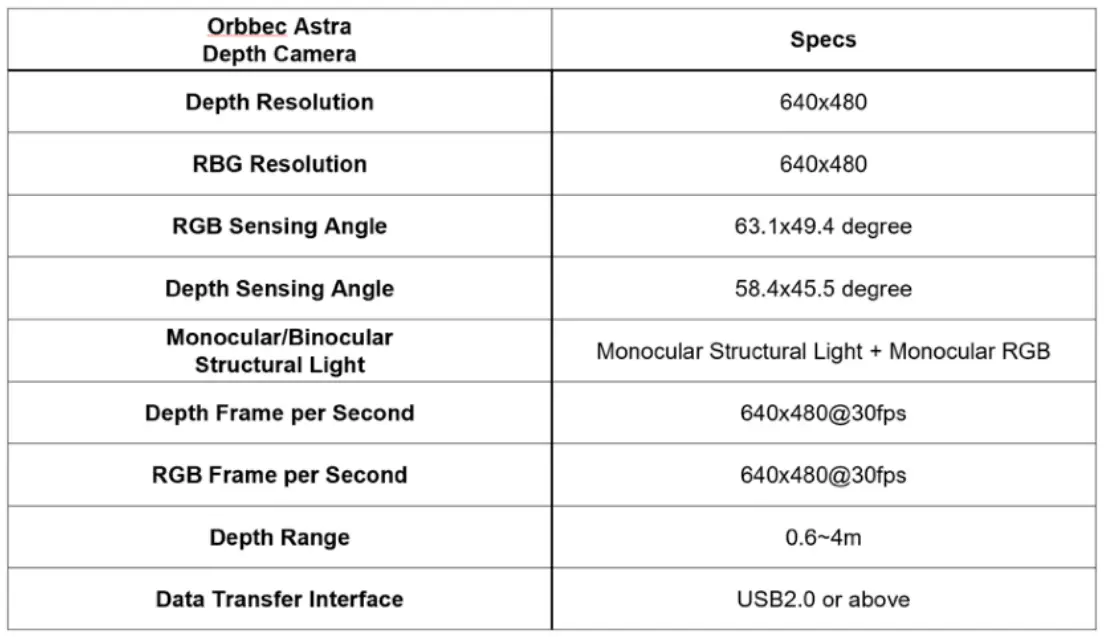
Placă STM32 (control motor, managementul energiei și IMU)
Placa STM32F103RC este microcontrolerul folosit în toate Rosbot-urile. Are un nucleu RISC ARM Cortex-M3 de înaltă performanță pe 32 de biți care funcționează la o frecvență de 72 MHz împreună cu memorii încorporate de mare viteză. Funcționează în intervalul de temperatură de la -40°C până la +105°C, potrivit pentru toate aplicațiile robotizate în climatele din întreaga lume. Există moduri de economisire a energiei care permit proiectarea aplicațiilor cu consum redus. Unele dintre aplicațiile acestui microcontroler includ unități de motor, controlul aplicațiilor, aplicații robotice echipamente medicale și portabile, periferice pentru PC și jocuri, platforme GPS, aplicații industriale, interfoane video pentru sisteme de alarmă și scanere.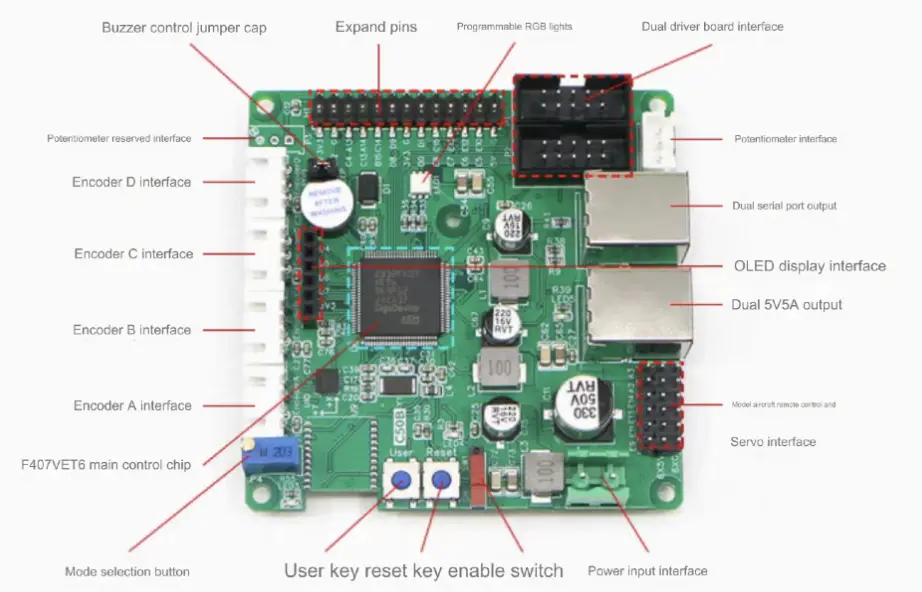
| STM32F103RC | Caracteristici |
| Miez | ARM32-bit Cortex –M3 CPU Viteză maximă de 72 MHz |
| Amintiri | 512 KB de memorie Flash 64 kB de SRAM |
| Ceasul, resetarea și gestionarea aprovizionării | Alimentare pentru aplicații de 2.0 până la 3.6 V și I/O |
|
Putere |
Modurile Sleep, Stop și Standby
Alimentare V pentru RTC și registre de rezervă BĂŢ |
| DMA | Controler DMA cu 12 canale |
| Modul de depanare | SWD și JTAG interfețe Cortex-M3 Embedded Trace Macrocell |
| Porturi I/O | 51 de porturi I/O (mapabile pe 16 vectori de întrerupere externi și toleranți la 5V) |
|
Cronometre |
Temporizatoare 4×16 biți
2 x temporizatoare PWM pentru controlul motorului pe 16 biți (cu oprire de urgență) 2 x temporizatoare watchdog (independent și Window) Timer SysTick (contor de 24 de biți) 2 temporizatoare de bază pe 16 biți pentru a conduce DAC-ul |
|
Interfață de comunicare |
Interfață USB 2.0 de viteză maximă Interfață SDIO
Interfață CAN (2.0B activă) |
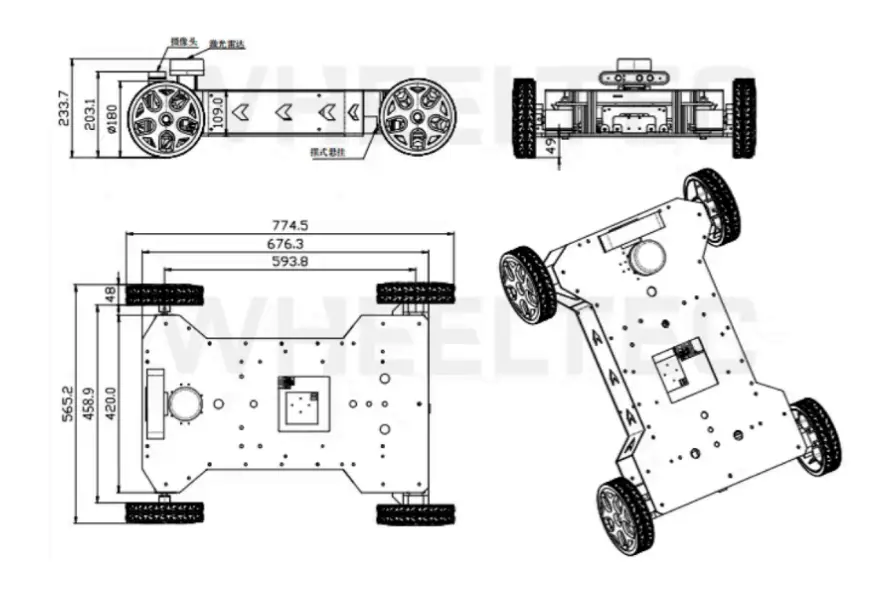
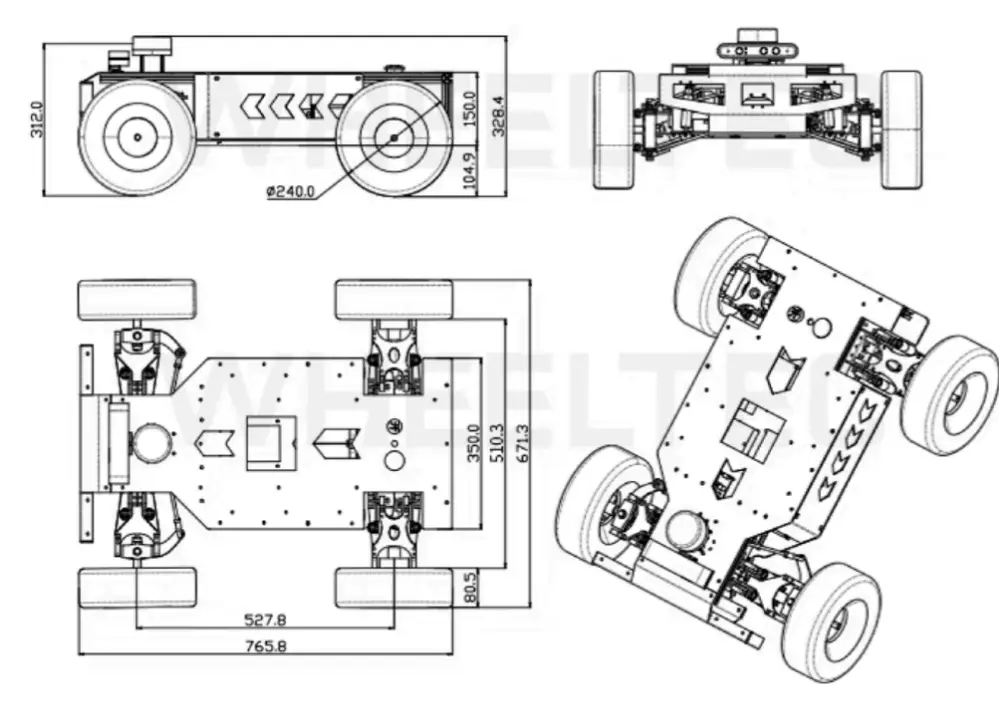
Sistem de direcție și conducere
Sistemul de direcție și conducere este integrat cu designul și construcția robotului. În funcție de modelul achiziționat, acesta va fi fie cu 2 roți, fie cu tracțiune pe 4 roți, ambele opțiuni fiind potrivite pentru o varietate de scopuri de cercetare și dezvoltare. Roțile tuturor roboților sunt din cauciuc solid cu anvelope de protecție împotriva zăpezii. Există un sistem de suspensie cu pendul coaxial, iar gama Robots sunt echipate cu amortizoare cu sisteme independente de suspensie, asigurându-le că pot naviga cu succes pe teren dificil.
Specificații tehnice pentru direcție și conducere:
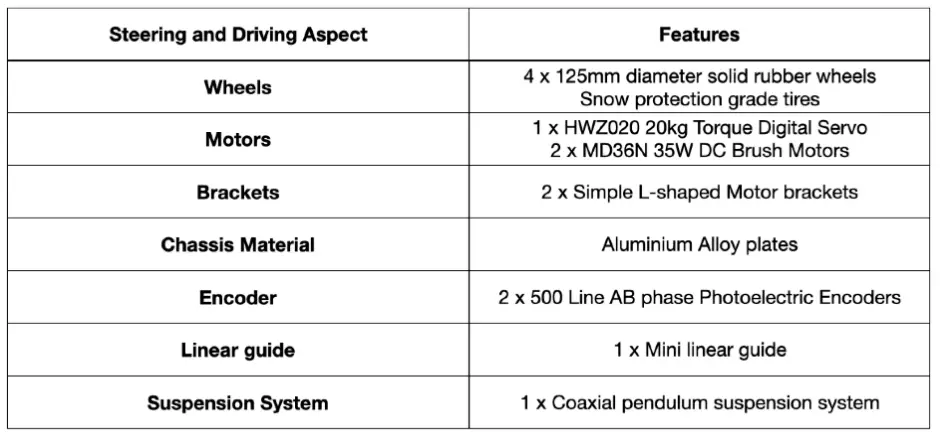
Diagrama de proiectare a șasiului robotului:
Robotul 2

Robot Pro
Robot Plus
Managementul energiei
Power Mag – baterie magnetică LFP:
Toate Rosbot-urile vin cu un Power Mag de 6000 mAh, o baterie magnetică LFP (Lithium Iron Phosphate) și un încărcător de alimentare. Clienții pot actualiza bateria la 20000 mAh la un cost suplimentar. Bateriile LFP sunt un tip de baterie litiu-ion cunoscută pentru stabilitatea, siguranța și durata de viață lungă. Spre deosebire de bateriile tradiționale litiu-ion, care folosesc cobalt sau nichel, bateriile LFP se bazează pe fosfat de fier, oferind o alternativă mai durabilă și mai puțin toxică. Sunt foarte rezistente la evadarea termică, reducând riscul de supraîncălzire și incendiu. Deși au o densitate de energie mai mică în comparație cu alte baterii litiu-ion, bateriile LFP excelează în durabilitate, cu durată de viață mai lungă, încărcare mai rapidă și performanțe mai bune la temperaturi extreme, făcându-le ideale pentru vehiculele electrice (EV) și sistemele de stocare a energiei. Power Mag poate fi atașat la orice suprafață metalică a unui robot datorită designului său de bază magnetică. Face ca schimbarea bateriilor să fie rapidă și ușoară.
Specificatii tehnice:
| Model | 6000 mAh | 20000 mAh |
| Pachet de baterii |
22.4V 6000mAh |
22.4V 20000mAh |
|
Material de bază |
Fosfat de litiu-fier |
Fosfat de litiu-fier |
| Cutoff Voltage | 16.5 V | 16.5 V |
|
Vol. complettage |
25.55 V |
25.55 V |
| Curent de încărcare | 3A | 3A |
| Materialul carcasei |
Metal |
Metal |
| Performanța de descărcare | 15A Descărcare continuă | 20A Descărcare continuă |
|
priză |
Conector mamă DC4017MM (încărcare) Conector mamă XT60U-F (descărcare) |
Conector mamă DC4017MM (încărcare) Conector mamă XT60U-F (descărcare) |
|
Dimensiune |
177*146*42mm |
208*154*97mm |
|
Greutate |
1.72 kg |
4.1 kg |
Protecție baterie
Protecție la scurtcircuit, supracurent, supraîncărcare, supradescărcare, suport pentru încărcare în timpul utilizării, supapă de siguranță încorporată, placă ignifugă.
Stație de încărcare automată (Power+):
Stația de încărcare automată este livrată cu modelul Rosbot 2+ și poate fi achiziționată separat pentru a funcționa cu Rosbot 2, Rosbot Pro și Rosbot Plus.
ROS 2 Pornire rapidă
Când robotul este pornit pentru prima dată, acesta este controlat de ROS în mod implicit. Adică, placa de control al șasiului STM32 acceptă comenzi de la controlerul ROS 2 – Jetson Orin. Configurarea inițială este rapidă și ușoară, de pe computerul gazdă (se recomandă Ubuntu Linux) conectați-vă la hotspot-ul Wi-Fi al robotului. Parola implicită este „Dongguan”. În continuare, conectați-vă la robot folosind SSH prin Linuxterminatee l, Adresa P este 192.168.0.10 și 0, iar parola implicită este Dongguan.
Cu acces terminal la robot, puteți naviga la folderul spațiului de lucru ROS 2, sub „wheeltec_ROS 2” Înainte de a rula programe de testare, navigați la wheeltec_ROS 2/turn_on_wheeltec_robot/ și localizați wheeltec_udev.sh – Acest script trebuie rulat, de obicei o singură dată pentru a asigura configurarea corecta a perifericelor. Acum puteți testa funcționalitatea robotului, pentru a lansa funcționalitatea controlerului ROS 2, rulați: „relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
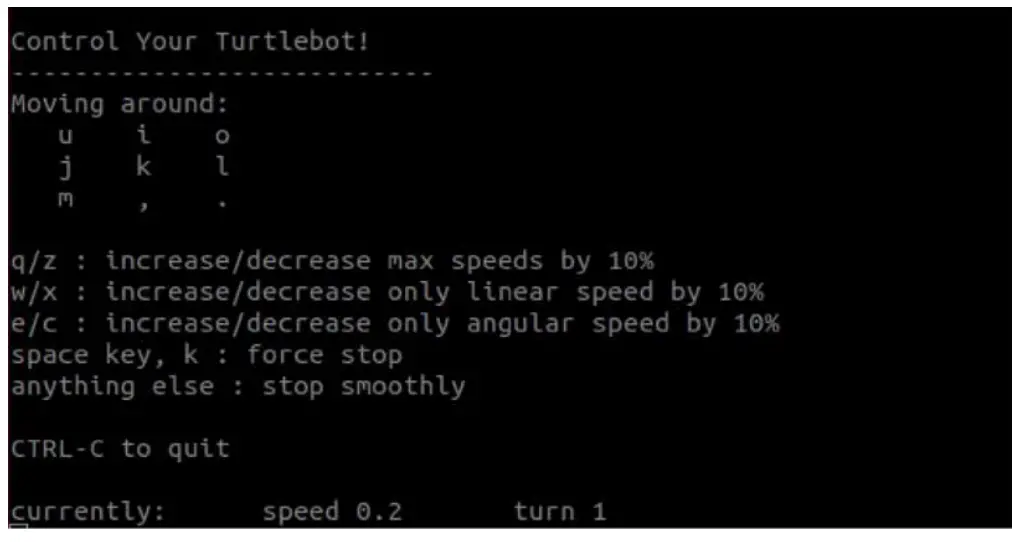
Într-un al doilea terminal, puteți utiliza nodul keyboard_teleop pentru a valida controlul șasiului, aceasta este o versiune modificată a popularului ROS 2 Turtlebot example. Tastați: „relansați wheeltec_robot_rc keyboard_teleop.launch”
Pachete ROS 2 Humble preinstalate
Mai jos sunt următoarele pachete orientate către utilizator, în timp ce alte pachete pot fi prezente, acestea sunt doar dependențe.
- turn_on_wheeltec_robot
Acest pachet este crucial pentru a permite funcționalitatea robotului și comunicarea cu controlerul șasiului. Scriptul principal „turn_on_wheeltec_robot.launch” trebuie utilizat la fiecare pornire pentru a configura ROS 2 și ontroller. - wheeltec_rviz2
Conține lansare files pentru a lansa viz cu configurație personalizată pentru Pickerbot Pro. - wheeltec_robot_slam
Pachet de cartografiere și localizare SLAM cu o configurație personalizată pentru Pickerbot Pro. - wheeltec_robot_rrt2
Algoritmul de explorare rapidă a arborelui aleatoriu – Acest pachet îi permite lui Pickerbot Pro să planifice o cale către locația dorită, prin lansarea nodurilor de explorare. - tastatură_robot_wheeltec
Pachet convenabil pentru validarea funcționalității robotului și controlul utilizând tastatura, inclusiv de la un computer gazdă la distanță. - wheeltec_robot_nav2
Pachetul ROS 2 Navigation 2 noduri. - wheeltec_lidar_ros2
Pachet ROS 2 Lidar pentru configurarea Leishen M10/N10. - wheeltec_joy
Pachetul de control cu joystick conține lansare files pentru nodurile Joystick. - simple_follower_ros2
Algoritmi de bază de urmărire a obiectelor și liniilor folosind scanare laser sau cameră de adâncime. - ros2_astra_camera
Pachetul de camere de profunzime Astra cu drivere și lansare files.
Rezumat
Robotul este conceput pentru dezvoltatorii, educatorii și studenții ROS (Robot Operating System). Inima Rosbot este cadrul software complet programabil și arhitectura hardware configurabilă bazată pe cea mai populară platformă robotică – ROS.
Robotul vine în trei categorii:
- Robotul 2 - Potrivit pentru începătorii ROS și proiecte cu buget redus.
- Robot Pro - Potrivit pentru dezvoltatorii și educatorii ROS care au nevoie de un sistem versatil pentru prototipare rapidă sau predare.
- Rosbot Plus – Aceasta este versiunea 4WD a lui Rosbot cu sisteme independente de suspensie. Această categorie este suficient de serioasă pentru a fi luată în considerare pentru dezvoltarea industrială și comercială. Robotul vine cu controlere ROS populare, cum ar fi:
- Jetson Orin Nano
- Jetson Orin NX
Pregătit de: Wayne Liu, Reilly Smithers și Tara Hercz 30 septembrie 2024
Versiune #: 20240930
Documente/Resurse
 |
Robot ROBOWORKS N10 Robot mobil programabil educațional [pdfManual de utilizare Robot N10 Robot mobil programabil educațional, N10, Robot Robot mobil programabil educațional, Robot mobil programabil educațional, Robot mobil programabil, Robot mobil, Robot |